自动控制原理笔记:频率响应设计与校正
1. 引言与基础概念
1.1 频率响应设计的目的
在控制系统中,瞬态响应(如超调量、调节时间)通常是最重要的指标。虽然频率响应法通过间接方式描述瞬态特性,但因其方便性,常用于通过伯德图(Bode Plot)进行系统设计。
主要频域指标与系统特性的关系:
-
低频区(远低于增益交界频率):表征闭环系统的稳态特性(稳态精度/稳态误差)。
-
中频区(增益交界频率附近):表征闭环系统的相对稳定性(相位裕量、增益裕量、谐振峰值)。
-
高频区(远高于增益交界频率):表征系统的复杂性及抗噪声能力 。
1.2 伯德图设计的一般步骤
- 调整开环增益 ,以满足稳态精度(如静态误差常数)的要求。
- 绘制未校正系统的伯德图。
- 若相位裕量或增益裕量不满足要求,则通过引入校正装置改变开环传递函数。
- 校正的实质:在稳态精度与相对稳定性之间寻求折中。
- 校正的目标:在低频区和增益交界频率附近,增益应该足够大,伯德图中对数幅值曲线的斜率应为-20dB/十倍频程。该斜率应延伸到足够的带宽,以保证适当的相位裕量。在高频区域,应当使增益尽可能快衰减下来,以便使噪声的影响达到最小。
2. 超前校正 (Lead Compensation)
2.1 特性与传递函数
超前校正主要用于改善瞬态响应(增加带宽、提高响应速度),但会增强高频噪声效应 。
- 传递函数:
其中 。零点位于 ,极点位于 。由于 ,零点总是位于极点的右方(更靠近虚轴)。
- 正弦传递函数:
- 通常 取值在 0.05 左右。
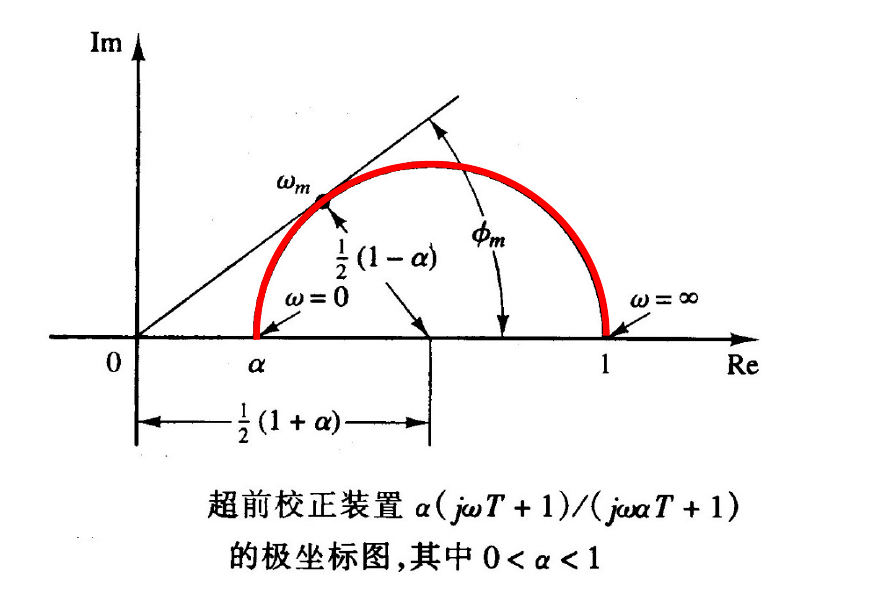
-
最大相位超前角 :发生在两个转角频率的几何中点 处:
该公式用于根据需要的相位超前量确定 值和 值。
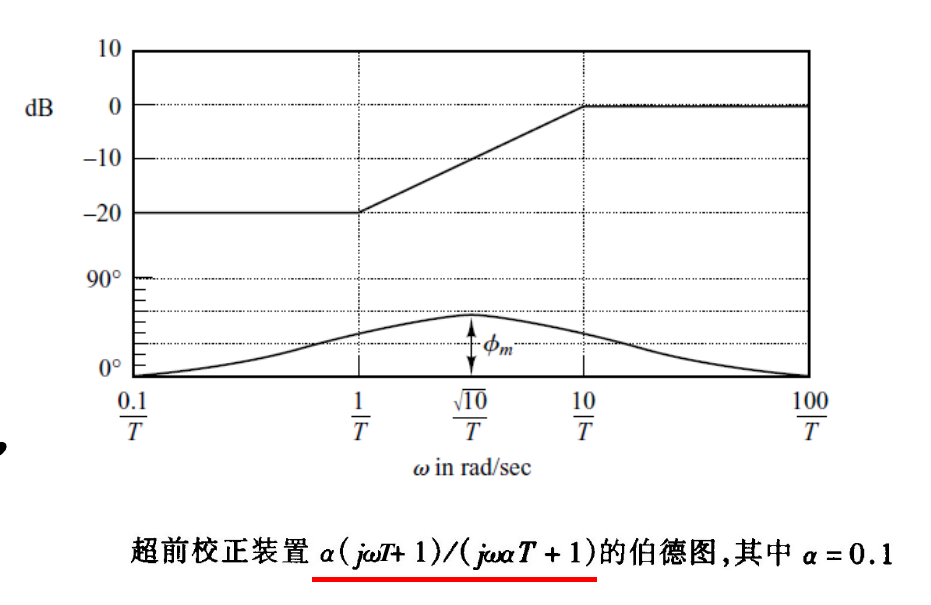
- 幅频特性:超前校正装置本质上是一个高通滤波器:高频部分通过,低频部分衰减。
- : dB
- : 20dB/dec 斜率上升
- : dB
- 注意:此处给出的幅值中假设 ,如 ,需要整体加上 dB的偏移量。图中则是假设了 和 ,故起始段为 dB 。
2.2 超前校正设计步骤
- 确定增益 :根据给定的静态误差常数(如 )确定满足稳态要求的开环增益。
- 定义 ,开环系统的静态增益为原来的 K 倍
校正系统的开环传递函数为
其中,开环系统的静态增益变成原来的 倍:
-
画未校正伯德图:利用已确定的 ,画出系统 的伯德图,并计算当前的相位裕量 15。
-
确定所需超前角:
其中 是为了补偿因高频增益上升,增益交界频率右移而增加的相位滞后,通常取 (例题中取了 ) 。
-
计算 :利用 求出 。
-
确定新的增益交界频率 : 在未校正系统的伯德图上,找到幅值为 dB(即 dB)的频率点,该点即为新的增益交界频率。同时令 ,把超前校正装置提供最大超前相角的频率适配到增益交界频率上
解释:超前校正装置在最大超前角频率 处的幅值增益为 。为了使校正后系统在该频率处穿越 0dB 线,未校正系统的幅值需为 dB。
-
确定 :由 计算 。
-
得出校正装置:用计算好的极点 和零点 ,并计算 。
2.3 实例 (Pages 16-23)
- 对象:
- 指标:, , .
- 结果:校正后系统带宽增加(截止频率从6.3 rad/s增加到9 rad/s),谐振频率增大,谐振峰幅值 减小,相对稳定性得到改善且响应速度变快。
- 局限性:如果在增益交界频率附近, 的相角减小得很快,超前校正就无效了,因为随着增益交界频率向右方移动,使其在新的增益交界频率上很难产生足够的相位超前去cover掉 在这一段上增加的相位滞后。
- 用小 值,但也不能太小(不应小于0.05),否则会导致起始段的增益太低(前面提过起始段 dB),需要给系统添加很大的附加增益 才能满足稳态性能要求。
- 如果一个不行,就考虑两个超前校正网络串联(需隔离)
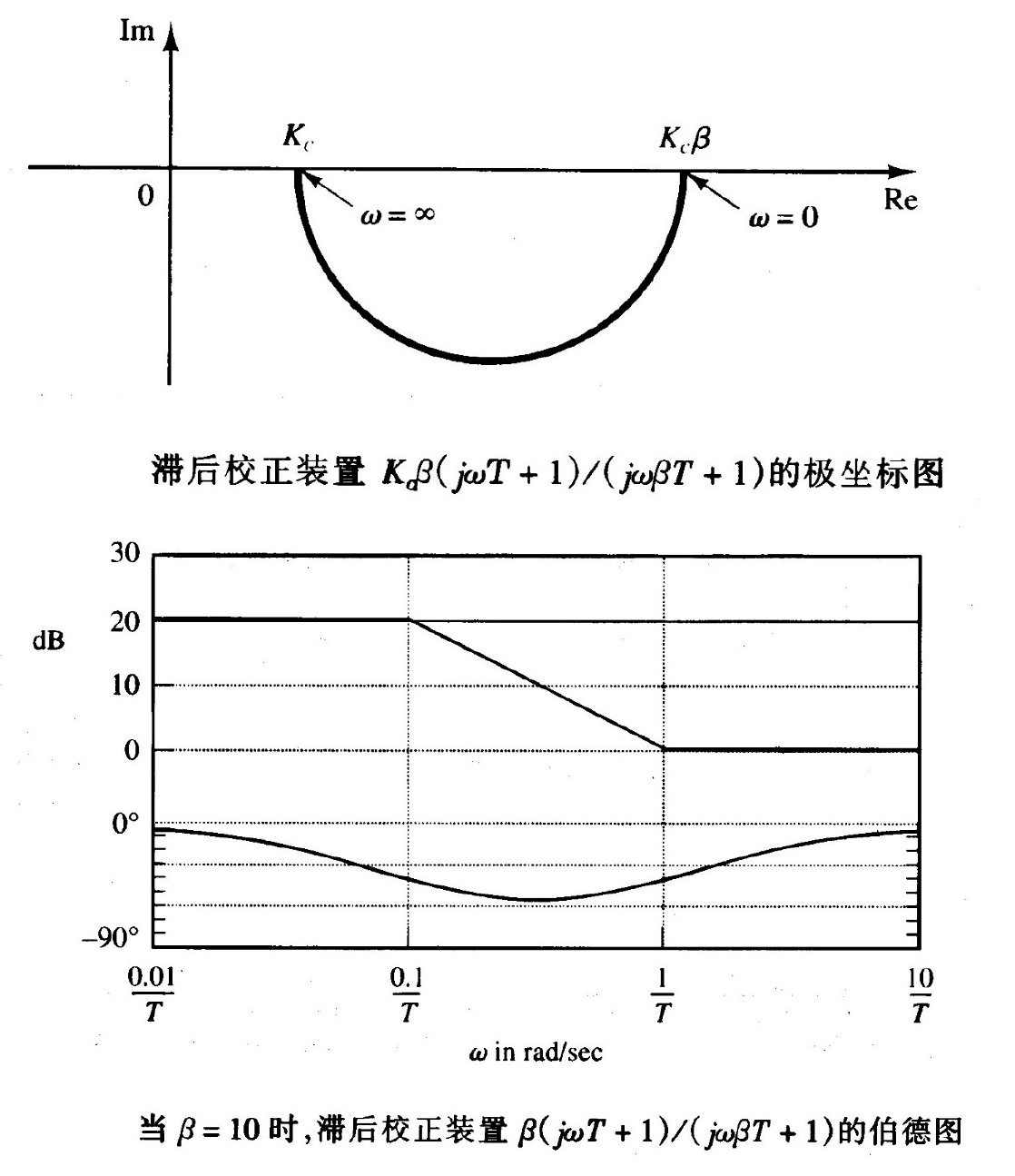
3. 滞后校正 (Lag Compensation)
3.1 特性与传递函数
滞后校正主要用于显著提高稳态精度,同时抑制高频噪声,但会减小系统带宽,导致瞬态响应变慢。
- 传递函数:
其中 。极点位于零点的右边(更靠近原点)。
- 频率特性:
- 低频()幅值为 dB,高频()幅值为 0 dB,中间段 dB/dec 斜率。
- 此处没有考虑 ,考虑 的话需要整体叠加上 dB的偏移量。按照滞后校正标准设计方法 ,这相当于把低频增益对齐到 dB ,而高频段进行衰减。
- 本质上是一个低通滤波器。
- 关键作用:利用其在高频段的衰减特性,降低增益交界频率,使系统获得足够的相位裕量(相位滞后特性在校正中是不希望的副作用)。
- 低频()幅值为 dB,高频()幅值为 0 dB,中间段 dB/dec 斜率。
3.2 滞后校正设计步骤
- 确定增益 :根据静态误差常数要求确定 。
- 寻找新的增益交界频率:在未校正系统 的相频曲线上,找到相角等于 的频率点,作为新的增益交界频率。
- 为补偿滞后校正带来的相位滞后,通常取 。
- 确定转角频率(零点): 为避免滞后影响,将滞后校正的零点 选在远低于新加益交界频率处(通常低一个到十个倍频程,例如 )。
- 反正,我们希望滞后校正的零点离新的增益交界频率尽可能远一些,以避免滞后校正附带的相位滞后,因为我们只想利用滞后校正带来的幅值衰减,而附加的相位滞后是我们不想要的。
- 确定 值:测量未校正系统在新交界频率处的幅值 (dB)。滞后装置需提供 dB 的衰减以使该处成为 0dB 交叉点。即 。
- 确定极点与 : 极点 。增益 。
3.3 实例 (Pages 34-41)
- 对象:
- 指标:, .
- 结果:未校正系统不稳定(PM = -20度)。校正后系统稳定,但增益交界频率从2 rad/s 降至 0.5 rad/s,带宽减小,响应速度变慢。
4. 滞后-超前校正 (Lag-Lead Compensation)
4.1 特性与传递函数
综合了超前和滞后校正的优点:既能改善稳态精度(低频增益大),又能增大带宽和稳定性(超前部分) 。
传递函数:
其中超前部分
滞后部分
通常设计时为了方便(减少一个可配置参数),取 。(当然也可以选择 )
- 相频特性:
- 当 时,该校正装置作为一个滞后校正装置,相角滞后。
- 当 时,该校正装置作为一个超前校正装置,提供超前相角。
- 频率 是相角等于 0 时的频率
- 幅频特性:
- 滞后校正在低频段,超前校正在中频段(较高频段),两者幅频特性叠加
- 假设 ,低频 和高频 为 0dB
- 中间频段增益为 dB
- 若考虑 ,整体叠加 的偏移量
- 滞后校正过渡段 -20dB/dec,超前校正过渡段 +20dB/dec
- 整体上类似一个带限滤波器
4.2 设计思路
设定 进行设计
-
超前部分(包含 ):在增益交界频率附近提供相位超前角,增大相位裕量。
-
滞后部分(包含 ):在增益交界频率附近产生幅值衰减,允许在低频范围内增大增益以提高稳态特性。
-
设计步骤(基于实例):
- 确定 满足稳态误差。
- 选择新的增益交界频率 。
- 计算在该频率所需的相角超前量,确定超前部分的 (即 ),此时参数 就已经确定。
- 设计滞后部分(确定滞后部分剩下的时间参数 ),使其转角频率 远低于 (例如选择 )。
- 利用几何作图法或计算,设计超前部分(确定超前部分的时间参数 ),使校正装置在 处提供适当的衰减和相位。
5. 各种校正方式的对比总结
| 特性 | 超前校正 (Lead) | 滞后校正 (Lag) | 滞后-超前校正 (Lag-Lead) |
|---|---|---|---|
| 主要作用 | 通过在增益交界频率处提供超前相角(相位超前特性),增加稳定裕量,改善瞬态响应,改善相对稳定性,增加带宽 | 通过降低高频增益(高频衰减特性),允许增大总增益,从而提高稳态精度,抑制高频噪声 | 兼顾稳态精度与快速响应 |
| 带宽变化 | 增大 (响应快) | 减小 (响应慢) | 适中/增大 |
| 频率特性 | 高通滤波器 | 低通滤波器 | 带限滤波器 |
| 信噪比 | 对高频噪声敏感 (信噪比变差) | 衰减高频噪声 (信噪比变好) | - |
| 增益需求 | 需要(往往较大的)附加增益 | 不需要很大的附加增益 | - |
| 适用场景 | 需快速响应系统 | 允许响应较慢但要求高精度的系统 | 要求高精度且快速响应的系统 |
6. 特殊情况与注意事项
6.1 开环与闭环截止频率的区分
- 开环截止频率(剪切频率):开环幅频特性穿越 0dB 线的频率。
- 闭环截止频率:闭环幅值响应降至低频幅值 -3dB (0.707) 时的频率。
- 关系:闭环截止频率 > 开环截止频率,且二者同向变动。
- 特别地,一阶系统相位裕度 时,闭环截止频率 = 开环截止频率。一般来说,二阶及以上系统
6.2 极点抵消 (Pole Cancellation)
-
原理:利用串联校正装置的零点(或极点)抵消系统中不希望的极点(或零点)。
-
限制:
-
不能抵消右半平面(不稳定)的极点。
- 由于极点和零点位置的不精确性, 几乎不可能将极点与零点完全抵消。若没有完全抵消,则系统的响应中包含随时间增加而逐渐增大的指数项,最终将导致系统的不稳定。
-
由于元件参数不精确,完全抵消很难实现。未完全抵消的靠近虚轴的二阶共轭极点可能导致长尾的瞬态响应。
- 不过,如果左半 s 平面内的极点被抵消得不彻底,未被完全抵消的极-零点组合将产生一个持续时间很长但幅值很小的瞬态响应分量,仍然属于正常情况,所以这样做是合理的。
-
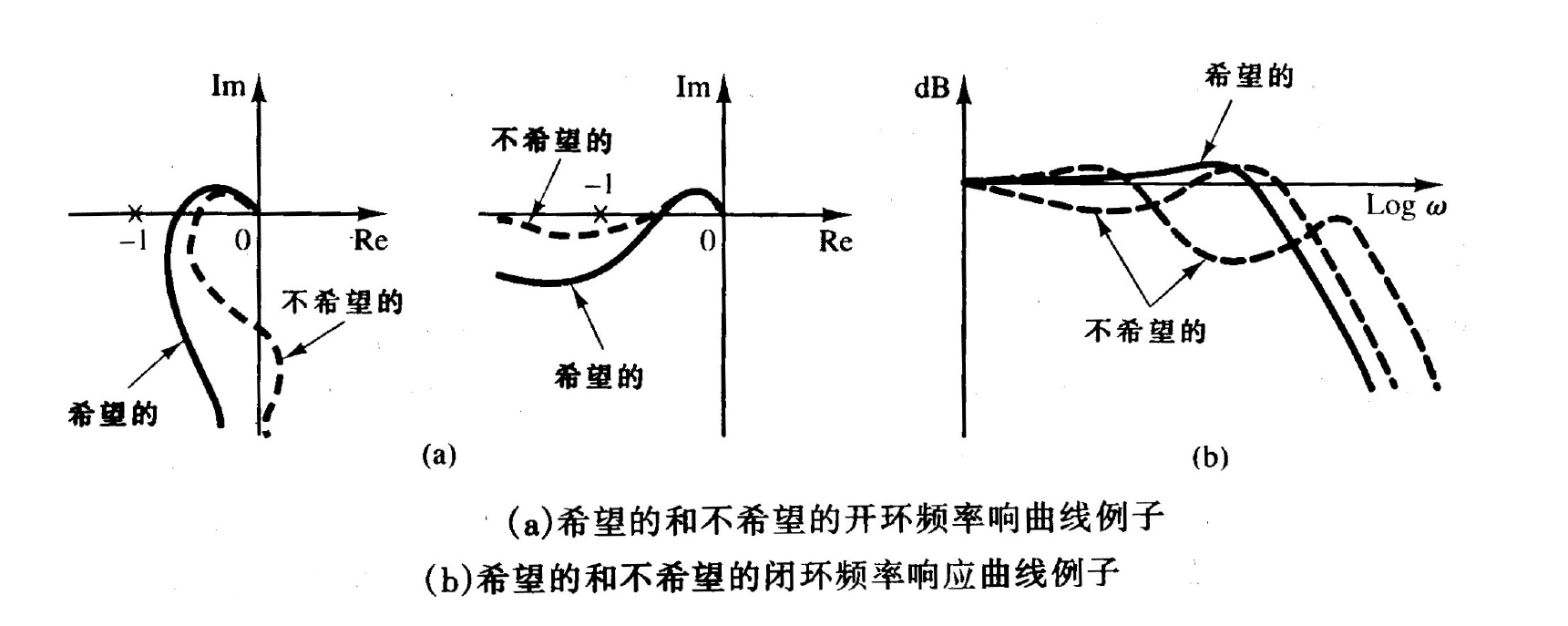
正弦传递函数全频域幅值都为1的控制系统(全通滤波器)只存在于理想情况中,实际不可能做到(能量传递不可能无限快,高频必有衰减)。
- 而且因为(高频)噪声几乎总是以某种形式存在,所以具有单位传递函数的系统也是不希望的,我们还是希望系统在高频段是衰减的。
-
-
相关解释:
-
在多数实际应用中,希望的控制系统应具有一对共轭复数闭环主导极点(低阶近似为欠阻尼二阶系统,有欠阻尼二阶系统的特性),并且具有适当的阻尼比和无阻尼自然频率。
-
闭环极-零点配置图的重要部分,如闭环主导极点位置的确定,建立在所需系统的性能指标的基础上。
-
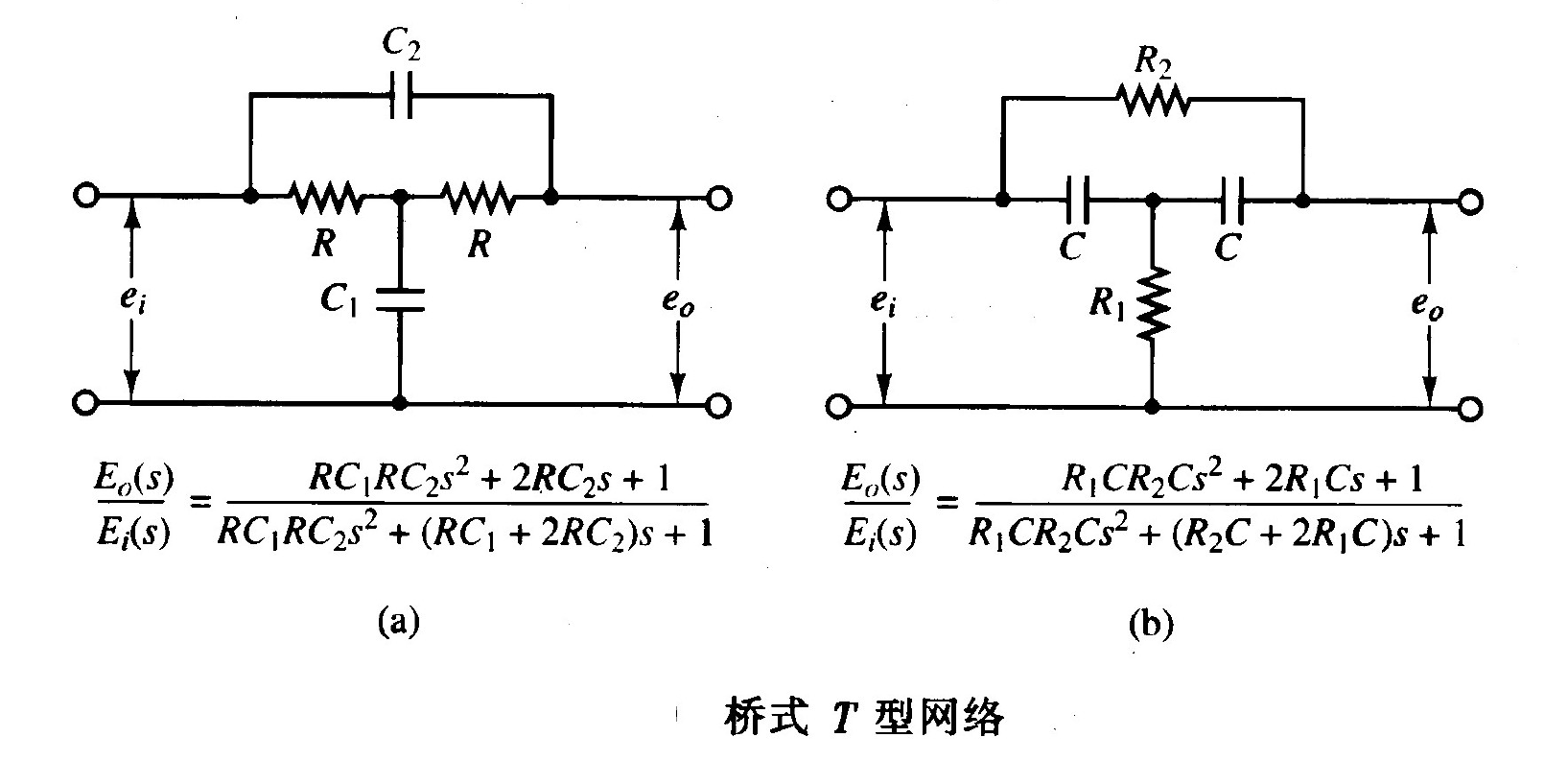
6.3 二阶极点抵消:桥式T型网络 (Bridged-T Network)
- 当系统包含共轭复数极点(欠阻尼二阶系统特性)时,普通的(只能提供一阶实数零极点的)超前/滞后校正/滞后-超前校正可能效果不佳。
- 在此情况下,采用具有两个(共轭复数)零点和两个极点的网络。如果零点选择得恰与对象的共轭复数极点相互抵消,则基本上能够以满意的极点取代不希望的极点。
- 此时(物理实现上)可使用桥式T型网络,它具有两个零点和两个极点,可用于抵消不希望的共轭复数极点。