Lecture 13 - Laplace Transform and Inverse Laplace Transform
Motivation for Laplace Transform 💡
The Fourier Transform is a powerful tool, but it has limitations.
A key Dirichlet condition for the convergence of the Fourier Transform is that the signal must be absolutely integrable (∫−∞∞∣x(t)∣dt<∞).
Signals like x(t)=etu(t) are not absolutely integrable, and their Fourier Transform would result in infinities.
Fourier analysis is suitable for absolutely integrable signals and stable LTI systems (whose impulse response is absolutely integrable). For other signals and systems, it’s not guaranteed to work.
The Laplace Transform is a more generalized tool that can handle non-absolutely-integrable signals and unstable systems.
The Laplace Transform: Definition 📜
For an arbitrary signal x(t), its Laplace Transform X(s) is defined as:
X(s)=L{x(t)}≜∫−∞∞x(t)e−stdt
where s=σ+jω is a complex variable.
Note: The Fourier Transform is a special case of the Laplace Transform when σ=0 (i.e., on the jω axis in the s-plane). X(jω)=∫−∞∞x(t)e−jωtdt.
The Laplace transform can be viewed as a 2-dimensional continuous-time signal on the s-plane.
A Set of “Preconditioned” Fourier Transforms
The Laplace Transform can be interpreted as the Fourier Transform of a “preconditioned” signal.
Let s=σ+jω. Then,
For σ=0, X(s) is directly the Fourier Transform of x(t).
For σ=0, the Laplace Transform of x(t) is the Fourier Transform of the preconditioned signal x(t)e−σt.
Although x(t) might not satisfy the 1st Dirichlet condition, x(t)e−σt may satisfy it for certain values of σ. This “preconditioning” allows analysis of signals not representable by the Fourier Transform.
Example: x(t)=etu(t)
This signal is not absolutely integrable, so its Fourier Transform doesn’t converge in the usual sense.
However, the preconditioned signal is etu(t)⋅e−σt=e−(σ−1)tu(t).
This preconditioned signal is representable by FT if σ−1>0 (i.e., σ>1), as the growing exponential is changed into a decaying one.
It is not representable by FT if σ−1≤0.
Thus, even if the FT of the original signal doesn’t converge, the FT of the preconditioned signal might, allowing the Laplace Transform to be used.
Region of Convergence (ROC) 🌐
The Laplace Transform of a signal often converges for some values of σ but not for others.
The Region of Convergence (ROC) is the set of all points s in the s-plane for which the Laplace Transform integral is finite:
ROC={s∈C∣∣L{x(t)}(s)∣<∞}
The ROC is often visualized as a shaded area in a “bird-view” of the s-plane.
Example: Evaluate the Laplace Transform of x(t)=e−atu(t) and its ROC.
X(s)=∫−∞∞e−atu(t)e−stdt=∫0∞e−(s+a)tdt
Let s=σ+jω. Then the integral becomes
X(s)=∫0∞e−(σ+a)te−jωtdt=F{e−(σ+a)tu(t)}
If σ+a>0, or Re{s}>−a, then X(s)=jω+σ+a1=s+a1.
Otherwise, if Re{s}≤−a, the integral is ∞.
Thus, the Laplace Transform is X(s)=s+a1, with the ROC: Re{s}>−a. We write it as
X(s)=s+a1;Re{s}>−a
Caveat on ROC:
X(s)=s+a1;Re{s}>−a actually means:
X(s)={s+a1;∞;Re{s}>−aRe{s}≤−a
This is not equivalent to X(s)=s+a1;Re{s}<−a. They represent different functions.
Two different functions can have an identical algebraic expression for their Laplace Transform but different ROCs.
For X(s)=s+23−s+12 to be valid, both ROCs must be satisfied. The overall ROC is the intersection of the individual ROCs.
Thus, X(s)=s+23−s+12, with ROC: Re{s}>−1.
Using ROC to determine convergence of FT:
If the ROC of the Laplace Transform includes the jω axis (Re{s}=0), then the Fourier Transform X(0+jω)=F{x(t)} converges.
Otherwise, if the ROC does not include the jω axis, the Fourier Transform does not converge.
Pole-Zero Plot (零极点图) 🗺️
The Laplace Transform is often visualized with a bird’s-eye view of the s-plane. This view makes ROC specification easy. However, it’s not great for showing the value of X(s) itself.
Zeros (零点): Values of s for which X(s)=0.
Poles (极点): Values of s for which X(s)=∞.
Zeros and poles can be complex-valued.
Example: Let X(s)=(s+2)(s+1)s−1; ROC: Re{s}>−1.
Zero: s=1.
Poles: s=−1,s=−2.
A pole-zero plot adds labels for zeros (often ‘o’) and poles (often ‘x’) to the s-plane view, giving a rough understanding of the magnitude of X(s).
Virtual Poles/Zeros for Rational Laplace Transform
Consider X(s)=D(s)N(s), where N(s) and D(s) are polynomials in s.
If Order(D) > Order(N) ⟹X(∞)=0⟹virtual zeros at s=∞. (e.g., s+11)
If Order(D) < Order(N) ⟹X(∞)=∞⟹virtual poles at s=∞. (e.g., s+1)
If Order(D) = Order(N) ⟹ neither zeros nor poles exist at s=∞.
Example: For X(s)=(s+2)(s+1)s−1, Order(D) = 2, Order(N) = 1. So, there is a virtual zero at s=∞. It has two poles at s=−2 & s=−1, and two zeros at s=1 & s=∞.
Poles/Zeros for Rational Laplace Transform - Caveat
For rational Laplace transforms
X(s)=D(s)N(s)=M∏(s−αi)∏(s−βn)
poles are usually the roots of the denominator D(s), and zeros are usually the roots of the numerator N(s).
HOWEVER, this is not true in general. Exceptions occur when the numerator and denominator share a common root.
So, X(−a)=T, which means s=−a is neither a pole nor a zero.
A “zero” and “pole” at the same location in the s-plane may cancel each other out.
We can’t determine poles and zeros simply by roots of the denominator and numerator; we need to judge based on the value of X(s)!
Computer-aided visualization: Plotting ∣X(s)∣ or ∠X(s) on the s-plane (e.g., using MATLAB) can provide a more complete picture than just the pole-zero plot.
Properties of ROC 📌
The ROC for a Laplace transform obeys certain rules:
Property #1: The ROC of X(s) consists of vertical strips parallel to the jω-axis in the s-plane.
If a point s0 is in the ROC, then the entire line {s0+jω∣ω∈R} is in the ROC.
If a point s0∈/ROC, then the entire line {s0+jω∣ω∈R}⊂ROC
This is because the convergence depends on F{x(t)e−σt}. If this Fourier Transform converges for a given σ, it converges for all ω associated with that σ. Thus, ROC membership is independent of ω.
Property #2: The ROC does not contain any poles (and thus, the vertical lines passing through the poles are not in the ROC).
If s0 is a pole, X(s0)=∞, so s0 is not in the ROC. By Property #1, the entire vertical line through s0 is not in the ROC.
Property #3: If x(t) is of finite duration and absolutely integrable (i.e., ∫T1T2∣x(t)∣dt<∞ for x(t) non-zero only in T1≤t≤T2), then the ROC is the entire s-plane.
Since e−σt is bounded over any finite interval [T1,T2] for any finite σ,
if ∫T1T2∣x(t)∣dt<∞, then ∫T1T2∣x(t)e−σt∣dt≤max(∣e−σT1∣,∣e−σT2∣)∫T1T2∣x(t)∣dt<∞ for all σ.
Property #4: If x(t) is a right-sided signal (i.e., x(t)=0 for t<T ), and if a line Re{s}=σ0 is in the ROC, then all values of s for which Re{s}>σ0 are also in the ROC.
The ROC is a right half-plane bounded by some σR that satisfies σR<σ0 , possibly C.
The factor e−σt provides increasing attenuation for t>0 as σ increases, aiding convergence for large t.
Property #5: If x(t) is a left-sided signal (i.e., x(t)=0 for t>T2 for some T2), and if a line Re{s}=σ0 is in the ROC, then all values of s for which Re{s}<σ0 are also in the ROC.
The ROC is a left half-plane bounded by some σL that satisfies σL>σ0 , possibly C.
The factor e−σt provides decreasing attenuation (or increasing gain) for t<0 as σ decreases (becomes more negative), aiding convergence for large negative t.
Property #6: If x(t) is a two-sided signal(双边都有,即无限信号), and if a line Re{s}=σ0 is in the ROC, then the ROC is a vertical strip in the s-plane that includes Re{s}=σ0. It can also be empty or, if x(t) is finite duration, the entire s-plane.
A two-sided signal can be written as x(t)=xR(t)+xL(t), where xR(t) is right-sided and xL(t) is left-sided.
The ROC of X(s) is the intersection of the ROC of XR(s) (a right half-plane Re{s}>σR) and the ROC of XL(s) (a left half-plane Re{s}<σL).
If σR<σL, the intersection is the strip σR<Re{s}<σL.
Else, the intersection is empty, which means the ROC is empty
If both ROCs are the entire s-plane, then the intersection is the entire s-plane.
Summary of ROC shapes based on signal type:
Signal Type
Typical ROC Shape
Finite Duration (Compact Support)
Entire s-plane (if absolutely integrable) or empty
Right-sided
Right half-plane (Re{s}>σmax) or empty
Left-sided
Left half-plane (Re{s}<σmin) or empty
Two-sided (Infinite) (双边都有,即无限信号)
Single Vertical strip (σ1<Re{s}<σ2) or empty
Example 9.7: x(t)=e−b∣t∣
This is a two-sided signal: x(t)=e−btu(t)+ebtu(−t).
For e−btu(t), X1(s)=s+b1, ROC: Re{s}>−b.
For ebtu(−t), X2(s)=s−b−1, ROC: Re{s}<b.
The ROC for X(s) is the intersection of these two ROCs.
If b>0: −b<Re{s}<b. The Laplace Transform is X(s)=s+b1−s−b1=s2−b2−2b.
If b<0: Let b′=−b>0. Then x(t)=eb′∣t∣. The ROCs are Re{s}>b′ and Re{s}<−b′. Since b′>0, there is no common area, so the Laplace Transform does not converge for any s.
If b=0: x(t)=1. This is not absolutely integrable, and the Laplace transform does not converge (except in generalized function sense, which is beyond this scope).
Properties of ROC for Rational Laplace Transforms
For Laplace Transforms X(s) that are rational functions of s (i.e., a ratio of polynomials in s):
Property #7: If the Laplace Transform X(s) of x(t) is rational, then its ROC is bounded by poles or extends to infinity.
This means the ROC is a vertical strip (or half-plane) whose boundaries are defined by the real parts of poles.
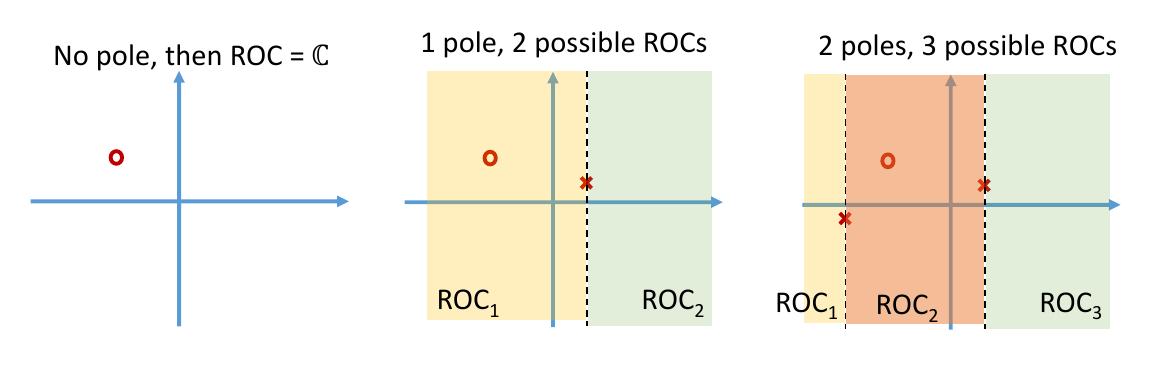
No poles: ROC is the entire s-plane.
1 pole at s=p1: ROC is Re{s}>Re{p1} or Re{s}<Re{p1}. (2 possible ROCs)
2 poles at s=p1,s=p2 (assume Re{p1}<Re{p2}): ROC is Re{s}<Re{p1}, or Re{p1}<Re{s}<Re{p2}, or Re{s}>Re{p2}. (3 possible ROCs)
Property #8: If X(s) is rational and its ROC exists (i.e., it converges for at least one point):
If x(t) is right-sided, the ROC is the region in the s-plane to the right of the rightmost pole (i.e., Re{s}>max(Re{pi})). This is more specific than Property #4.
If x(t) is left-sided, the ROC is the region in the s-plane to the left of the leftmost pole (i.e., Re{s}<min(Re{pi})). This is more specific than Property #5.
If x(t) is two-sided, the ROC is a single strip between two adjacent poles (i.e., Re{pk}<Re{s}<Re{pj} for some poles pk,pj, and no poles exist in this strip). This is more specific than Property #6.
Invalid ROC examples based on properties:
A ROC that includes a pole violates Property #2.
A ROC for a rational transform that is not bounded by poles (e.g., a finite, non-strip region, or a strip whose boundaries are not poles) violates Property #7.
A ROC for a right-sided signal that is to the left of a pole, or a left-sided signal to the right of a pole, or a two-sided signal that is not between two poles (or is a half-plane) violates Property #8.
Example 9.8: Determine all possible ROCs and corresponding signal types for X(s)=s2+3s+21=(s+1)(s+2)1.
This can be written using partial fractions as X(s)=s+11−s+21.
The poles are at s=−1 and s=−2.
Since X(s) is rational, there are 3 possible ROCs based on Property #7 & #8:
ROC1: Re{s}>−1. This is a right half-plane bounded by the rightmost pole (s=−1). This indicates x(t) is a right-sided signal.
x(t)=(e−t−e−2t)u(t)
ROC2: Re{s}<−2. This is a left half-plane bounded by the leftmost pole (s=−2). This indicates x(t) is a left-sided signal.
x(t)=(−e−t+e−2t)u(−t)
ROC3: −2<Re{s}<−1. This is a strip between two adjacent poles. This indicates x(t) is a two-sided signal.
x(t)=−e−tu(−t)−e−2tu(t)
Supplement
Exact Number of zeros and poles at ∞
Here’s how to determine the specific number for a rational Laplace Transform X(s)=D(s)N(s):
Let M be the degree (highest power of s) of the numerator polynomial N(s).
Let K be the degree of the denominator polynomial D(s).
The behavior at s=∞ depends on the relative degrees of these polynomials:
If the degree of the denominator is greater than the degree of the numerator (K>M):
X(s) approaches 0 as s→∞.
There are K−M zeros at s=∞.
If the degree of the numerator is greater than the degree of the denominator (M>K):
X(s) approaches ∞ as s→∞.
There are M−K poles at s=∞.
If the degree of the numerator is equal to the degree of the denominator (M=K):
X(s) approaches a finite, non-zero constant as s→∞.
There are neither poles nor zeros at s=∞.
Essentially, you’re looking at how X(s) behaves as s becomes very large. For large s, X(s)≈bKsKaMsM=bKaMsM−K. The exponent M−K tells you the nature and number of roots at infinity:
If M−K is negative (i.e., K−M is positive), you have K−M zeros at infinity.
If M−K is positive, you have M−K poles at infinity.
If M−K is zero, no poles or zeros at infinity.
Lecture 14: Properties of Laplace Transform
These notes cover the remaining properties of the Region of Convergence (ROC), the Inverse Laplace Transform, and the algebraic properties of the Laplace Transform.
Properties of ROC
The Region of Convergence (ROC) for the Laplace transform has several defining properties. These properties help in understanding the characteristics of the signal x(t) from its Laplace transform X(s).
Basic Properties of ROC
Different types of signals have different ROCs. These include:
Compactly supported signals
Right-sided signals
Left-sided signals
Two-sided signals
Properties of ROC for Rational Laplace Transform
Property #7
If the Laplace transform X(s) of x(t) is rational, then its ROC is bounded by poles or extends to infinity.
This property helps determine the ROC for a rational Laplace transform spectrum.
If there are no poles, the ROC is the entire s-plane (C).
With 1 pole, there are 2 possible ROCs (e.g., Re{s}>σ1 or Re{s}<σ1).
With 2 poles, there are 3 possible ROCs (e.g., Re{s}<σ1, σ1<Re{s}<σ2, or Re{s}>σ2).
Some ROC configurations are impossible as they violate basic ROC properties (like Property #2, which states ROC consists of strips parallel to the jω-axis) or properties #7 and #8.
Property #8
If the Laplace transform X(s) of x(t) is rational and converges for at least one point in the s-plane:
If x(t) is right-sided, the ROC is the right half-plane bounded by the rightmost pole. This is more specific than the general Property #4 for right-sided signals.
If x(t) is left-sided, the ROC is the left half-plane bounded by the leftmost pole. This is more specific than the general Property #5 for left-sided signals.
If x(t) is two-sided, the ROC is a single strip between two adjacent poles. This is more specific than the general Property #6 for two-sided signals.
Example 9.8: Determining ROCs and Signal Types
Given the Laplace transform:
X(s)=s2+3s+21=s+11−s+21
Steps to analyze:
Is this rational? Yes.
What are the poles? The poles are at s=−1 and s=−2.
Use Property #8.
Since X(s) is rational, there are 3 possible ROCs and corresponding signal types:
ROC1: Re{s}>−1. This is a right half-plane bounded by the rightmost pole (s=-1), indicating x(t) is a right-sided signal.
ROC2: Re{s}<−2. This is a left half-plane bounded by the leftmost pole (s=-2), indicating x(t) is a left-sided signal.
ROC3: −2<Re{s}<−1. This is a strip between two adjacent poles, indicating x(t) is a two-sided signal.
Inverse Laplace Transform (拉普拉斯反变换)
The Laplace transform can be inverted to retrieve the time-domain signal x(t) from its s-domain representation X(s).
Laplace transform: x(t)→X(s)
Inverse Laplace transform: X(s)→x(t)
Theoretical Formula for Inverse Laplace Transform
The inverse Laplace transform is defined by the line integral:
x(t)=2πj1∫σ−j∞σ+j∞X(s)estds
where the integration is performed along a line Re{s}=σ within the ROC of X(s).
Proof of Inverse Laplace Transform Formula
The proof is based on the relationship X(s)=X(σ+jω)=F{x(t)e−σt}, where F denotes the Fourier Transform.
For any σ in the ROC: x(t)e−σt=F−1{X(σ+jω)}=2π1∫−∞+∞X(σ+jω)ejωtdω
This leads to: x(t)=eσt⋅2π1∫−∞+∞X(σ+jω)ejωtdω x(t)=2π1∫−∞+∞X(σ+jω)e(σ+jω)tdω
Let s=σ+jω, so ds=jdω. When ω→±∞, s→σ±j∞. x(t)=2πj1∫σ−j∞σ+j∞X(s)estds
Notes on Inverse Laplace Transform:
The formula x(t)=2πj1∫σ−j∞σ+j∞X(s)estds is based on x(t)=eσtF−1{X(σ+jω)} for σ∈ROC.
The line of integration (Re{s}=σ) must belong to the ROC.
Any line (any σ) within the ROC can be used to evaluate the inverse Laplace transform, and all will yield the same result.
Practical Evaluation Method for Inverse Laplace Transform (PROCS)
Direct inversion using the line integral can be difficult. For rational Laplace transforms, the PROCS procedure is often easier:
Partial-fraction expansion of X(s).
Determine the ROC of each fraction based on the overall ROC of X(s).
Determine the Signal of each fraction using a table of common Laplace transform pairs (like Table 9.2).
Table 9.2 (Selected Pairs):
Transform Pair
Signal x(t)
Transform X(s)
ROC
2
u(t)
s1
Re{s}>0
3
−u(−t)
s1
Re{s}<0
6
e−αtu(t)
s+α1
Re{s}>−α
7
−e−αtu(−t)
s+α1
Re{s}<−α
8
[cosω0t]u(t)
s2+ω02s
Re{s}>0
9
[sinω0t]u(t)
s2+ω02ω0
Re{s}>0
Examples 9.9-9.11: PROCS Procedure
Determine the original signal x(t) for X(s)=(s+1)(s+2)1 with different ROCs.
Partial-fraction expansion: X(s)=s+11−s+21.
Case 1: ROC is Re{s}>−1
P step: X(s)=s+11−s+21.
ROC step:
For the term s+11 (pole at s=−1): ROC must be Re{s}>−1.
For the term s+21 (pole at s=−2): ROC must be Re{s}>−2.
(Both are consistent with the overall ROC Re{s}>−1).
S step: Using transform pair e−atu(t)↔s+a1 with Re{s}>−a: x(t)=e−tu(t)−e−2tu(t).
Case 2: ROC is Re{s}<−2
P step: X(s)=s+11−s+21.
ROC step:
For the term s+11 (pole at s=−1): ROC must be Re{s}<−1.
For the term s+21 (pole at s=−2): ROC must be Re{s}<−2.
(Both are consistent with the overall ROC Re{s}<−2).
S step: Using transform pair −e−atu(−t)↔s+a1 with Re{s}<−a: x(t)=−e−tu(−t)−(−e−2tu(−t))=−e−tu(−t)+e−2tu(−t).
Case 3: ROC is −2<Re{s}<−1
P step: X(s)=s+11−s+21.
ROC step:
For the term s+11 (pole at s=−1): ROC must be Re{s}<−1.
For the term s+21 (pole at s=−2): ROC must be Re{s}>−2.
(Both are consistent with the overall ROC −2<Re{s}<−1).
S step:
Using −e−atu(−t)↔s+a1 for Re{s}<−a for the first term.
Using e−atu(t)↔s+a1 for Re{s}>−a for the second term. x(t)=−e−tu(−t)−(e−2tu(t))
Algebraic Properties of Laplace Transform
These properties are useful for deriving the Laplace transform (algebraic form + ROC) for signals related to another signal whose Laplace transform is known.
1. Linearity (线性)
If x1(t)↔X1(s) with ROC R1 and x2(t)↔X2(s) with ROC R2.
Then ax1(t)+bx2(t)↔aX1(s)+bX2(s) with ROC containing R1∩R2.
Exception: If pole-zero cancellation occurs, the ROC can be larger. (e.g. ∞+(−∞)=0 case implies a cancellation).
Example 9.13: Pole Cancellation
Given x(t)=x1(t)−x2(t). X1(s)=s+11, Re{s}>−1. X2(s)=(s+1)(s+2)1=s+11−s+21, Re{s}>−1.
Then X(s)=X1(s)−X2(s)=s+11−(s+11−s+21)=s+21.
The ROC for X(s) is Re{s}>−2.
Initially, R1∩R2 would be Re{s}>−1. However, due to the cancellation of the pole at s=−1, the ROC expands.
Two poles at the same location may cancel, leading to an expanded ROC.
Otherwise, the new ROC is exactly the intersection of the original ROCs. For example, if X1(s)=s+11 with Re{s}<−1 and X2(s)=s+21 with Re{s}>−2, then the ROC for X1(s)−X2(s) is −2<Re{s}<−1.
2. Time Shifting (时移性质)
If x(t)↔X(s) with ROC R.
Then x(t−t0)↔X(s)e−st0 with ROC R.
Multiplying by e−st0 does not change the ROC because it doesn’t make a finite number infinite or vice versa (i.e., doesn’t add or remove poles).
3. Shifting in the s-domain (s域平移)
If x(t)↔X(s) with ROC R.
Then x(t)es0t↔X(s−s0) with ROC R+Re{s0}.
The ROC is shifted along the σ-axis by Re{s0}.
Shifting along the jω-axis (i.e., if s0=jω0) does not change the ROC.
Example: s-domain shifting
Let x(t)=e−tu(t)↔X(s)=s+11, with ROC σ>−1.
Consider x(t)e−2t=e−tu(t)e−2t=e−3tu(t).
Using the s-domain shifting property with s0=−2: e−3tu(t)↔X(s−(−2))=X(s+2)=(s+2)+11=s+31.
The new ROC is R+Re{s0}=(σ>−1)+(−2)=σ>−1−2=σ>−3.
4. Time Scaling (时域尺度变换)
If x(t)↔X(s) with ROC R.
Then x(at)↔∣a∣1X(as) with ROC aR.
Scaling in the time domain causes inverse scaling of the Laplace transform along both the jω-axis and the σ-axis.
The ROC is changed to aR due to the anti-scaling along the σ-axis. If R is Re{s}>σ1, then aR is Re{s/a}>σ1, so Re{s}>aσ1 if a>0, or Re{s}<aσ1 if a<0. More generally, if s∈R, then s/a must satisfy the conditions for R. This means if σmin<Re{s}<σmax is R, then σmin<Re{s/a}<σmax. This implies aσmin<Re{s}<aσmax if a>0, and aσmax<Re{s}<aσmin (or aσmin>Re{s}>aσmax) if a<0.
Special Case: x(−t)
Here a=−1. x(−t)↔∣−1∣1X(−1s)=X(−s).
The ROC becomes −R.
X(−s) is X(s) reversed about the s-plane origin (reversed about both σ-axis and jω-axis).
−R is R reversed about the jω-axis (since ROCs are vertical strips).
Indications:
If x(t) is even symmetric (x(t)=x(−t)), then X(s)=X(−s), and R=−R. This means X(s) is even symmetric about the s-plane origin, and R is symmetric about the jω-axis (a half-plane ROC is impossible unless it’s the entire s-plane).
If x(t) is odd symmetric (x(t)=−x(−t)), then X(s)=−X(−s), and R=−R. This means X(s) is odd symmetric about the s-plane origin, and R is symmetric about the jω-axis.
Example: Time Scaling
Given x(t)=e−tu(t)↔X(s)=s+11, ROC: σ>−1.
Determine the Laplace transform of x(t/(−2)).
Here a=−1/2. x(−2t)↔∣−1/2∣1X(−1/2s)=2X(−2s). 2X(−2s)=2⋅(−2s)+11=1−2s2.
The original ROC is Re{s}>−1. The new ROC is aR, so Re{−2s}>−1. Re{−2s}>−1⟹−2Re{s}>−1⟹Re{s}<1/2.
So the ROC is σ<1/2.
Laplace Transform Properties
1. Time Scaling (时域尺度变换)
If x(t)↔X(s) with ROC: R, then for a non-zero constant a:
x(at)↔∣a∣1X(as)
The new ROC is aR={s′∣s′/a∈R}.
Scaling in the time domain by a causes an inverse scaling in the s-domain by 1/a for both the real (σ) and imaginary (jω) axes.
The ROC changes due to this anti-scaling along the σ-axis.
Special Case: Time Reversal
If a=−1:
x(−t)↔X(−s)
The new ROC is −R.
X(−s) is X(s) reversed about the s-plane origin (both σ and jω axes).
−R is R reversed about the jω-axis.
Symmetry Implications from Time Reversal:
If x(t) is even symmetric (x(t)=x(−t)), then X(s)=X(−s) (even symmetric about the origin) and R=−R (ROC is symmetric about the jω-axis). Half-plane ROCs are not possible for non-trivial even signals.
If x(t) is odd symmetric (x(t)=−x(−t)), then X(s)=−X(−s) (odd symmetric about the origin) and R=−R (ROC is symmetric about the jω-axis).
Example:
Given x(t)=e−tu(t)↔X(s)=s+11 with ROC: σ>−1.
Determine the Laplace transform of x(t/(−2)).
Here a=−1/2.
The new ROC is aR=(−1/2)R. If Re{sold}>−1, then Re{snew/a}>−1⇒Re{−2snew}>−1⇒−2σnew>−1⇒σnew<1/2.
So, ROC: σ<1/2.
2. Conjugation (共轭对称性)
If x(t)↔X(s) with ROC: R, then:
x∗(t)↔X∗(s∗)
The ROC remains R.
X∗(s∗) is X∗(σ−jω), which means the original Laplace transform X(σ+jω) is conjugated and its imaginary frequency component is reversed.
Proof:L{x∗(t)}=∫−∞∞x∗(t)e−stdt=∫−∞∞(x(t)e−s∗t)∗dt. This can be related to the Fourier Transform: L{x∗(t)}=F{x∗(t)e−σt}=F{(x(t)e−σt)∗}. Using the conjugation property of FT, this becomes X∗(σ−jω)=X∗(s∗).
Indications for Real Signals x(t):
If x(t) is real, then x(t)=x∗(t), which implies X(s)=X∗(s∗).
This means X(σ+jω)=X∗(σ−jω).
The Laplace transform of a real signal is conjugate symmetric about the σ-axis (real axis).
Re{X(s)} is even symmetric about the σ-axis.
Im{X(s)} is odd symmetric about the σ-axis.
Poles and Zeros: For real signals, all complex poles and zeros must occur in conjugate pairs. Poles and zeros on the real axis do not require a conjugate pair.
If X(σ+jω)=0 (a zero), then X(σ−jω)=0.
If X(σ+jω)=±∞ (a pole), then X(σ−jω)=±∞.
Example Visual:
Signal 1: Has a non-real zero without a conjugate pair, so it cannot correspond to a real signal.
Signal 2: Has a non-real pole without a conjugate pair, so it cannot correspond to a real signal.
Signal 3: Shows a pole on the real axis and a pair of conjugate zeros, which can correspond to a real signal.
3. Convolution Property (卷积性质)
If x1(t)↔X1(s) with ROC: R1 and x2(t)↔X2(s) with ROC: R2, then:
x1(t)∗x2(t)↔X1(s)X2(s)
The ROC of the product X1(s)X2(s) contains R1∩R2.
Typically, the ROC is R1∩R2.
The ROC can be larger than R1∩R2 (i.e., ROC⊇R1∩R2) if pole-zero cancellation occurs between X1(s) and X2(s).
Eigenfunction Property of LTI Systems:
For an LTI system with impulse response h(t), if the input is est, the output is estH(s).
Thus, Laplacian complex exponentials est are eigenfunctions of LTI systems.
Proof of Convolution Property:
Let y(t)=x(t)∗h(t). x(t)=2πj1∫σ−j∞σ+j∞X(s′)es′tds′ (Inverse Laplace Transform) y(t)=(2πj1∫σ−j∞σ+j∞X(s′)es′tds′)∗h(t)
Due to linearity of integration and convolution: y(t)=2πj1∫σ−j∞σ+j∞X(s′)[es′t∗h(t)]ds′
Using the eigenfunction property es′t∗h(t)=H(s′)es′t: y(t)=2πj1∫σ−j∞σ+j∞X(s′)H(s′)es′tds′
This is the inverse Laplace transform of X(s′)H(s′). So, Y(s)=X(s)H(s).
Examples of ROC for Convolution:
Pole-Zero Cancellation leading to ROC expansion:
Let x1(t)=u(t)↔X1(s)=s1, ROC: Re{s}>0.
Let x2(t)=δ′(t)↔X2(s)=s, ROC: All s.
Then x1(t)∗x2(t)↔X1(s)X2(s)=s1⋅s=1.
The ROC of 1 is the entire s-plane (C). Here R1∩R2=Re{s}>0. The final ROC is C, which is larger than R1∩R2.
Pole-Zero Cancellation and ROC: X1(s)=s+11, ROC:R1={σ>−1}. X2(s)=(s+2)(s+3)s+1, ROC:R2={σ>−2}. X1(s)X2(s)=(s+2)(s+3)1. R1∩R2={σ>−1}. The poles of the product are at s=−2,s=−3. The ROC of the product is σ>−2. This ROC is larger than R1∩R2.
4. Differentiation in the Time Domain (时域微分)
If x(t)↔X(s) with ROC: R, then:
dtdx(t)↔sX(s)
The ROC of sX(s) contains R (ROC⊇R).
The ROC can become larger if X(s) has a pole at s=0 which is cancelled by the multiplication by s.
Example using s-Domain Differentiation:
Determine the time domain signal x(t) for X(s)=(s+a)21, ROC: σ>−a.
We know that e−atu(t)↔s+a1.
Also, (s+a)21=−dsd(s+a1).
Using the s-domain differentiation property, if −dsd(s+a1)↔Y(s), then x(t) corresponding to (s+a)21 is tx0(t) where x0(t)↔s+a1.
So, x(t)=te−atu(t). (This also directly matches pair 8 in Table 9.2)
Example: Partial Fraction Expansion and Inverse Transform
Given X(s)=(s+1)2(s+2)2s2+5s+5, Re{s}>−1. Determine x(t).
Using partial fraction expansion: X(s)=(s+1)2A+s+1B+s+2C
Calculation yields: A=2,B=−1,C=3. X(s)=(s+1)22−s+11+s+23, Re{s}>−1.
Using standard pairs (and the previous example for the first term): x(t)=[2te−t−e−t+3e−2t]u(t).
6. Integration in the Time Domain (时域积分)
If x(t)↔X(s) with ROC: R, then:
∫−∞tx(τ)dτ↔s1X(s)
The ROC of s1X(s) contains R∩{Re[s]>0}.
The ROC can be larger if X(s) has a zero at s=0 that cancels the pole introduced by 1/s.
Proof (using convolution):∫−∞tx(τ)dτ=x(t)∗u(t).
We know u(t)↔s1 with ROCu={Re[s]>0}.
Using the convolution property, x(t)∗u(t)↔X(s)⋅s1. The ROC contains R∩ROCu=R∩{Re[s]>0}.
7. Initial-Value Theorem (初值定理)
If x(t)=0 for t<0 AND x(t) contains no impulses or higher-order singularities at t=0, then the initial value of x(t) at t=0+ is:
x(0+)=s→∞limsX(s)
Informal Explanation:sX(s)≈L{dtdx(t)}. Then lims→∞sX(s)=limσ→∞∫0−∞x′(t)e−σtdt. As σ→∞, e−σt becomes highly concentrated at t=0+. This integral then approximates ∫0−0+x′(t)dt=x(0+)−x(0−). Since x(t)=0 for t<0, x(0−)=0. Thus, x(0+).
8. Final-Value Theorem (终值定理)
If x(t)=0 for t<0 AND x(t) contains no impulses or higher-order singularities at t=0 AND x(t) has a finite limit as t→∞ (i.e., all poles of sX(s) are in the LHP), then the final value of x(t) is:
limt→∞x(t)=s→0limsX(s)
Tentative Explanation: Similar to the initial value theorem, lims→0sX(s)=limσ→0∫0−∞x′(t)e−σtdt=∫0−∞x′(t)dt=x(∞)−x(0−). Since x(0−)=0, this is x(∞).
Condition for applicability: The theorem applies only if sX(s) has all its poles in the left-half s-plane. If there are poles on the jω-axis (for s=0) or in the RHP, x(t) either oscillates or grows unboundedly, and the theorem does not hold.
Examples of Initial and Final Value Theorems:
Example (A):
H(s)=s(s+1)1, Re{s}>0. Poles of sH(s)=s+11 is at s=−1 (LHP). h(∞)=lims→0sH(s)=lims→0s(s+1)s=lims→0s+11=1.
H(s)=s+21, Re{s}>−2. Poles of sH(s)=s+2s is at s=−2 (LHP). h(∞)=lims→0sH(s)=lims→0s+2s=20=0.
Example (B): X(s)=(s2+2s+10)(s+2)2s2+5s+12, Re{s}>−1. sX(s)=(s2+2s+10)(s+2)s(2s2+5s+12). Initial Value: x(0+)=lims→∞sX(s)=lims→∞s3+4s2+14s+202s3+5s2+12s=lims→∞s32s3=2. Final Value: Poles of X(s) are at s=−2 and s2+2s+10=0⇒s=2−2±4−40=−1±j3. All poles are in LHP. x(∞)=lims→0sX(s)=lims→0(s2+2s+10)(s+2)s(2s2+5s+12)=10⋅20⋅12=0.
Table of Common Laplace Transforms
Signal x(t)
Transform X(s)
ROC
a\delta(t)$
1
All s
u(t)
s1
Re{s}>0
−u(−t)
s1
Re{s}<0
e−αtu(t)
s+α1
Re{s}>−Re{α}
−e−αtu(−t)
s+α1
Re{s}<−Re{α}
te−αtu(t)
(s+α)21
Re{s}>−Re{α}
(n−1)!tn−1e−αtu(t)
(s+α)n1
Re{s}>−Re{α}
[cos(ω0t)]u(t)
s2+ω02s
Re{s}>0
[sin(ω0t)]u(t)
s2+ω02ω0
Re{s}>0
[e−αtcos(ω0t)]u(t)
(s+α)2+ω02s+α
Re{s}>−Re{α}
[e−αtsin(ω0t)]u(t)
(s+α)2+ω02ω0
Re{s}>−Re{α}
Laplace Transform for LTI System Analysis
System Function H(s)
The system function (or transfer function) of an LTI system is the Laplace transform of its impulse response h(t):
H(s)=L{h(t)}
Given an input x(t)↔X(s), the output y(t)↔Y(s) is:
Y(s)=H(s)X(s)
The ROC of Y(s) is ROCY⊇ROCX∩ROCH.
The system function H(s) is a generalization of the frequency response H(jω), and can be used for unstable systems where H(jω) might not converge.
Frequency Response Consideration:
If h(t)=etu(t), then H(s)=s−11 with ROCH:Re{s}>1. This system is unstable, and its ROC does not include the jω-axis, so its frequency response H(jω) does not converge. Laplace transform is suitable here.
Causality and ROC
Causal System ⇒ Right-Half Plane ROC: If an LTI system is causal (h(t)=0 for t<0), then the ROC of its system function H(s) (if it exists) must be a right-half plane (i.e., Re{s}>σmax, where σmax is the real part of the rightmost pole, or Re{s}>−∞ if no poles).
This is a necessary condition. A right-half plane ROC implies the signal is right-sided, but not necessarily causal (h(t)=0 strictly for t<0).
Example of right-sided, non-causal: h(t)=e−(t+1)u(t+1) has H(s)=s+1es with ROC Re{s}>−1. h(t) is non-zero for −1≤t<0.
Rational System Function and Causality: For an LTI system with a rational system function H(s), Causality ⇔ RHP ROC:
The system is causal if and only if the ROC of H(s) is a right-half plane, specifically Re{s}>Re{prightmost}, where prightmost is the pole with the largest real part. If there are no poles, the ROC is the entire s-plane.
Anti-Causal System ⇒ Left-Half Plane ROC: An anti-causal LTI system (h(t)=0 for t>0) has a system function whose ROC is a left-half plane (Re{s}<σmin).
For rationalH(s): The system is anti-causal if and only if its ROC is a left-half plane, Re{s}<Re{pleftmost}.
Examples - Causality from ROC:
H(s)=s+11 with ROC Re{s}>−1. Since H(s) is rational and its ROC is a right-half plane to the right of its pole at s=−1, the system is causal.
h(t)=e−∣t∣. This system is not causal as h(t)=0 for t<0.
Its Laplace transform is H(s)=s2−1−2=(s−1)(s+1)−2 with ROC −1<Re{s}<1.
This H(s) is rational. The ROC is a strip, not a right-half plane to the right of the rightmost pole (s=1). This is consistent with the system being non-causal.
Stability and ROC
An LTI system is stable if and only if the ROC of its system function H(s)includes the entire jω-axis (Re{s}=0).
Causal and Rational System Stability: A causal LTI system with a rational system function H(s) is stable if and only if all of its poles lie strictly in the left-half of the s-plane (Re{pole}<0).
If a causal system has poles on the jω-axis, it is unstable.
Example - Stability and Causality: h(t)=e−tu(t)+e−2tu(t). H(s)=s+11+s+21=(s+1)(s+2)(s+2)+(s+1)=s2+3s+22s+3.
The poles are at s=−1 and s=−2.
The ROC is Re{s}>−1.
Causality:H(s) is rational, and the ROC Re{s}>−1 is a right-half plane to the right of the rightmost pole (s=−1). Thus, the system is causal.
Stability: The ROC Re{s}>−1 includes the jω-axis (Re{s}=0). Thus, the system is stable.
(Alternatively for causal rational system: All poles s=−1,s=−2 are in the LHP, so the system is stable.)
System Function of LTI Systems Described by LCCDEs
For a Linear Constant-Coefficient Differential Equation (LCCDE):
k=0∑Nakdtkdky(t)=k=0∑Mbkdtkdkx(t)
Assuming initial rest conditions (zero initial state), applying the Laplace transform (using the differentiation property L{dtkdkf(t)}=skF(s)):
k=0∑NakskY(s)=k=0∑MbkskX(s)
The system function H(s) is:
H(s)=X(s)Y(s)=∑k=0Naksk∑k=0Mbksk
This H(s) is always a rational function of s.
The ROC of H(s) is not determined by the equation alone; it depends on system properties like causality or stability.
Example - ROC based on System Properties:
Given LCCDE dtdy(t)+y(t)=x(t). The system function is H(s)=s+11.
If the system is causal, ROC is Re{s}>−1.
If the system is anti-causal, ROC is Re{s}<−1.
If the system is stable, the ROC must include the jω-axis. For H(s)=s+11, this means ROC is Re{s}>−1. (Thus a stable system with this H(s) must also be causal).
If the system is unstable, the ROC Re{s}<−1 would make it unstable.
Example: RLC Circuit
For a series RLC circuit with input x(t) (voltage source) and output y(t) (voltage across capacitor C):
Differential Equation: LCdt2d2y(t)+RCdtdy(t)+y(t)=x(t).
System Function: H(s)=s2+(R/L)s+(1/LC)1/LC.
Assume causality with R=2,L=1,C=1: H(s)=s2+2s+11=(s+1)21. Poles at s=−1 (double).
Since causal, ROC is Re{s}>−1.
Assume stability and R,L,C are positive:
Poles of H(s) are roots of s2+(R/L)s+(1/LC)=0. If R,L,C>0, the coefficients (R/L) and (1/LC) are positive.
This ensures that the real parts of the poles are negative (i.e., poles are in LHP).
Since the system is stable, the ROC must include the jω-axis.
Given poles are in LHP and ROC includes jω-axis, the ROC must be a right-half plane Re{s}>Re{prightmostpole}. (This also implies causality for such a system).
Example 9.25: Determining H(s), DE, Causality, Stability
Given LTI system with input x(t)=e−3tu(t) and output y(t)=[e−t−e−2t]u(t). X(s)=s+31, ROCX:Re{s}>−3. Y(s)=s+11−s+21=(s+1)(s+2)1, ROCY:Re{s}>−1.
System function: H(s)=X(s)Y(s)=1/(s+3)1/((s+1)(s+2))=(s+1)(s+2)s+3=s2+3s+2s+3.
Differential Equation: From H(s)(s2+3s+2)=(s+3), we get Y(s)(s2+3s+2)=X(s)(s+3). dt2d2y(t)+3dtdy(t)+2y(t)=dtdx(t)+3x(t).
ROC of H(s): Poles are at s=−1,s=−2. Possible ROCs: Re{s}>−1, Re{s}<−2, or −2<Re{s}<−1.
Using ROCY⊇ROCX∩ROCH.
If ROCH=Re{s}>−1: ROCX∩ROCH=(Re{s}>−3)∩(Re{s}>−1)=Re{s}>−1. Only this matches ROCY.
Thus, ROCH=Re{s}>−1.
Causality:H(s) is rational, ROC is Re{s}>−1 (RHP to the right of rightmost pole), so system is causal.
Stability: ROC Re{s}>−1 includes the jω-axis, so system is stable.
Example 9.26: Determining H(s) from Properties
Given LTI system:
Causal.
H(s) rational, only 2 poles at s=−2 and s=4.
If input x(t)=1 (DC), output y(t)=0.
h(0+)=4.
Derivation:
From (1) & (2): Causal with poles at s=−2,s=4⟹ ROC is Re{s}>4.
(System is unstable as ROC does not include jω-axis / pole in RHP for causal system).
Denominator of H(s) is (s+2)(s−4).
From (3):
x(t)=1⟹X(0)=2πδ(s) . Y(s)=H(s)X(s). y(t)=0⟹Y(s)=0. This means H(0)=0 (since X(0)=0). So s=0 is a zero of H(s).
H(0)=0⟹ Numerator has a factor s. So H(s)=K(s+2)(s−4)s.
From (4): Initial Value Theorem: h(0+)=lims→∞sH(s)=4. sH(s)=K(s+2)(s−4)s2=Ks2−2s−8s2. lims→∞sH(s)=lims→∞Ks2s2=K.
So, K=4.
System Function: H(s)=(s+2)(s−4)4s.
Example 9.27: Analyzing System Properties
Given: Stable and causal LTI system, H(s) rational, pole at s=−2, no zero at origin (H(0)=0).
Inferences from given info:
Causal and stable ⟹ all poles in LHP (Re{s}<0). ROC is Re{s}>σmax_pole and includes jω-axis. So σmax_pole<0.
Pole at s=−2⟹σmax_pole≥−2. So, ROC is Re{s}>σ0 where −2≤σ0<0.
(a) F{h(t)e3t} converges?
This is equivalent to checking if H(s−3) has an ROC that includes the jω-axis. The ROC of H(s−3) is ROC of H(s) shifted right by 3: Re{s}>σ0+3. For convergence, 0>σ0+3⟹σ0<−3. This contradicts σ0≥−2. False.
(b) ∫−∞+∞h(t)dt=0?
This integral is H(0). System is stable, so H(0) is finite. Given H(s) does not have a zero at the origin, so H(0)=0. False.
(d) dh(t)/dt contains at least one pole in its Laplace transform. L{dh(t)/dt}=sH(s) (assuming h(0−)=0 for causal system). H(s) has a pole at s=−2. sH(s) will also have this pole (unless s=0 was the pole, which it is not). True.
(e) h(t) has finite duration.
If h(t) has finite duration, its ROC is the entire s-plane (except possibly s=0,∞). H(s) has a pole at s=−2, so ROC is not the entire s-plane. False.
(f) H(s)=H(−s).
This implies h(t) is an even function. A non-trivial causal function cannot be even unless it’s an impulse train at t=0. Pole at s=−2 means h(t) is not just cδ(t). If H(s)=H(−s), and sp=−2 is a pole, then s=−sp=2 must also be a pole. This contradicts stability for a causal system. False.
(g) lims→∞H(s)=2.
Let H(s)=N(s)/D(s). The limit depends on the relative degrees of N(s) and D(s).
If H(s)=2+s+21, then lims→∞H(s)=2. This H(s) is causal, stable (pole at s=−2), no zero at origin (H(0)=2.5).
If H(s)=s+21, then lims→∞H(s)=0. This also fits the criteria.
Therefore, there is insufficient information.